
Projet WindEEPP 2.0
Partie Mécanique
La partie mécanique a trois objectifs : optimiser la récupération d’énergie éolienne, permettre une conversion optimale de l’énergie éolienne en énergie électrique et permettre le pilotage du cerf-volant. La solution que nous allons vous proposer est conçue pour un système récupérant de l’énergie à partir d’un cerf-volant à deux suspentes.
Le premier objectif est d’optimiser la récupération d’énergie éolienne, la structure doit pouvoir être mobile pour s’orienter face au vent. Pour pouvoir placer le cerf-volant n’importe où dans l’espace, il faut que le système permette deux rotations orthogonales l’une par rapport à l’autre. De ce fait, lors de la conception le système doit comporter deux liaisons pivots orthogonales l’une par rapport à l’autre. Sur notre prototype, nous avons donc créé les liaisons 1 et 2 (cf.Fig) qui sont respectivement orientées suivant z et suivant y.
Le deuxième objectif est de permettre la transmission de l’énergie éolienne au moteur. Le cerf-volant lors du déroulement fournit son effort aux bobines via les fils. Il faut donc transmettre le moment de rotation des bobines au moteur, pour cela nous avons utilisé des courroies. Néanmoins la transmission de l’effort n’est pas optimale puisque nos courroies peuvent sauter des crans si l’effort est important. Ce problème est dû à notre incapacité à tendre les courroies correctement puisque le cadre en aluminium se déforme à cause des efforts de tension, il faudra donc l’usiner en acier à cause de contraintes trop importantes. Pour dimensionner les bobines il faut avoir un rapport de réduction entre vos bobines et votre moteur qui permet de faire fonctionner votre moteur en régime nominal le plus souvent possible.
Enfin le dernier objectif de la partie mécanique est de permettre le pilotage du cerf-volant. Le pilotage s’effectue en jouant sur la différence de longueur des suspentes, pour cela il faut que le cadre intérieur (contenant la génératrice et les bobines) puisse effectuer une rotation par rapport à l’axe z’ axe du repère orthonormé (M, x’, y, z’) avec x’ la direction des lignes et le point M situé sur l’axe du moteur. Pour cela nous avons créé une liaison pivot pilotable (numéro 1 sur la Figure) avec un axe sortant pour permettre le contrôle du cadre intérieur via un servomoteur relié à l’axe de la liaison en utilisant un plateau et une chaîne.
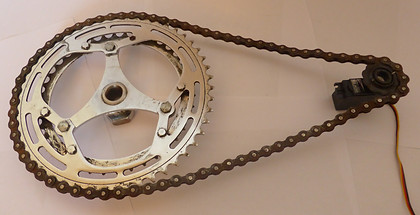

Pilotage de la liaison pivot 1, grâce au servomoteur