
Projet WindEEPP 2.0
Le prototype
Nous sommes le projet WindEEPP 2.0, qui s’est déroulé entre 2015 et 2017. Ce dossier a pour objectif de transmettre à une équipe future l’histoire de notre prototype, ses défauts, ses qualités et les raisons qui nous ont poussé à y aboutir.
Tout d’abord, lorsque nous avons repris le projet WindEEPP et suite à des entretiens avec Jérémy Cadillon et d’autres membres du groupe WindEEPP de 2013 à 2015, nous avons découvert qu’ils avaient usiné un prototype.
Nous avons pu récupérer ce prototype qui était stocké dans les labos de mécanique de l’école, cependant le cerf-volant qui était avec avait apparemment disparu. En l’état, le prototype n’était pas achevé.

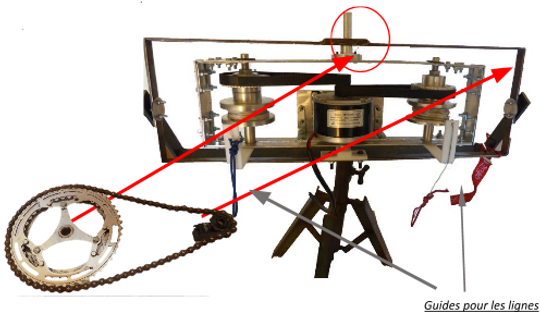
Photo du prototype rendu par la première génération de WindEEPP
On remarque tout de suite que le cadre intérieur et les bobines sont en aluminium. Ce n’est pas dérangeant pour les bobines mais on voit que le cadre intérieur est tordu sous la tension des courroies. De plus l’aluminium étant assez malléable, on a eu du mal à démonter les bobines et à retendre les courroies car l’aluminium s’était tordu dans les glissières (il suffisait d’ajouter des rondelles aux endroits indiqués (en rouge) sur la photo.
On voit ensuite que la mobilité selon l’axe indiqué est libre, or c’est la rotation selon cet axe qui va servir à piloter le cerf-volant pour lui faire décrire la trajectoire souhaitée, il aurait donc été judicieux de prévoir une manière de commander cette rotation.
Lorsque l’on fait tourner le moteur et qu’on enroule ou déroule les lignes, on se rend compte que les courroies se décalent petit à petit vers le haut ou vers le bas et qu’au bout d’un certain temps, elles sortent de l’engrenage. Cela peut être problématique si on effectue des tests.
On remarque aussi que comme les courroies sont tendues et engrainent directement sur l’axe du moteur, celui-ci s’est tordu ce qui va pouvoir générer une perte de rendement et des vibrations. Il aurait fallu pour remédier à cela faire en sorte que le moteur engraine sur un axe indépendant lui-même relié aux courroies.
Enfin, le prototype n’était pas terminé, le rendu attendu était celui-ci (cette image a été retrouvé sur leur drive mais nous ne possédons pas leur fichier Catia initial) :

Le cadre en bleu est donc absent ainsi que les guides en gris pour les lignes.
En reprenant ce projet, nous avons voulu ne pas repartir à zéro mais se baser sur l’acquis du groupe précédent, nous avons donc développé le cadre bleu et sa liaison avec le cadre rose, nous avons acheté un pied de parasol pour faire tenir le prototype. Nous avons développé une nouvelle liaison entre le cadre rouge et rose pour permettre de piloter la rotation et nous avons imprimé des guides (en gris) pour les lignes.

Enfin nous avons découpé au laser des guides pour contraindre les courroies à rester sur les pignons lorsque le moteur tourne et nous avons développé un capteur pour mesurer la vitesse de rotation du mécanisme à l’aide d’une fourche optique.


Le prototype actuel est donc fonctionnel même si de nombreux défauts persistent :
-
On voit que le mécanisme n’est pas équilibré, le servo-moteur doit donc développer un effort supplémentaire pour entraîner la rotation et piloter le cerf-volant.
-
Les courroies qui sont bloquées en translation par les cercles en bois frottent. Il y a donc des pertes à ce niveau mais aussi au niveau de l’axe du moteur où les deux courroies frottent l’une contre l’autre.
-
Le cadre intérieur en aluminium est assez fragile on remarque que lorsque le moteur tourne le cadre bouge un peu ce n’est pas très rassurant et ça peut provoquer des pertes.
-
On remarque aussi que si les courroies sont trop tendues, le cadre se déforme assez rapidement (ce qui fait que les courroies vont frotter plus fort entre elle et contre le guide)
-
On remarque que si les courroies sont insuffisamment tendues, certains crans sautent, le système n'entraîne pas parfaitement ce qui provoque des pertes.
-
Lier un cadre en aluminium et un cadre en acier provoque une corrosion accélérée ce qui peut rapidement poser problème.
-
Le prototype est adapté à une voile à deux suspentes dont la portance n’est pas réglable comme les cerfs-volants à trois ou quatre suspente et ainsi la puissance nécessaire au rembobinage est assez élevée.